Research
|
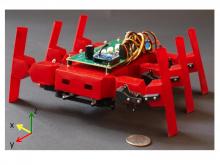
A Lightweight Modular 12-DOF Print-and-Fold Hexapod This project focuses on the design, fabrication and operation of a hexapod fabricated using a combination of printing and folding flat sheets of polyester. The polyester sheets are cut and engraved with crease patterns which are then manually folded to create 3D functional modules, inspired by the Japanese art of Origami. These modules, when connected, form a hexapod with 2 degrees of freedom per leg. We created this print-and-fold hexapod as a miniature version of a commercially available platform, to which we compare several performance metrics; weight, walking speed, and longevity. Our printed hexapod weights 206.3 g, can walk at speeds of up to 25.4 cm/sec and can be assembled within 7 hours. Using a custom printed circuit board, we can control the locomotion of the hexapod using a variety of walking gaits, and we enable path tracking. The next steps include enabling the platform to perform climbing behaviors with the future goal of enabling multiple print-and-fold robots to form structures with their bodies. Daniela Rus, Cagdas Onal, Daniel Soltero |
|
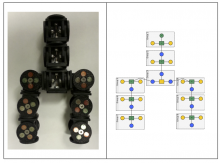
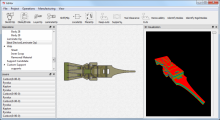
Algorithms for Robot Design Synthesis by Merging Modular robots offer the flexibility to adapt a single robot system to a wide range of tasks, but selecting an appropriate module configuration for a task can be very difficult for a non-expert user. We are developing an algorithm that can merge two existing mechanism designs into an optimal new design that implements both, allowing a user to create new designs using a library of base designs. Designs topologies are represented as graphs with edges corresponding to links and vertices corresponding to joints. Kinematic and physical constraints are represented as properties of each node and edge in the graph. Current work work focuses on applying our algorithm to SMORES, a new modular robot developed at Penn. We are progressively increasing the realism and expressiveness of our mechanism representation, so that our algorithm may eventually be applied to a wide range of sophisticated modular mechanisms. Mark Yim, Tarik Tosun, Sanjeev Khanna |
|
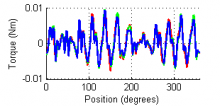
Anticogging: Increasing Performance From Low Cost Motors Smooth motion is critical to robotic applications like haptics or those requiring high precision force control. These systems are often direct-drive, so any torque ripple in the motor output must be minimal. Unfortunately, low inherent torque ripple motors are expensive. We came up with a method to map and suppress torque ripple from cogging torque so low cost motors can perform as well as expensive ones. Matt Piccoli, Mark Yim |
|
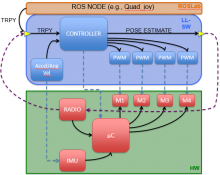
Co-design of Hardware and Software with ROSLab Building robots from scratch can be tough. Fortunately, we can reuse code and electrical circuit designs from one robot design to another. We built a database of commonly used code and circuits as well as a framework around it that allows simple addition of new circuit components and their required software counterparts. We are integrating this framework with ROSLab for simple drag-and-drop design of ciruit boards and the code that runs on them. Nicola Bezzo, Insup Lee, Mark Yim, Matt Piccoli |

|
Design of 3D Printable Mechanical Components for End-User Customization The objective of this project is to develop a suite of algorithms to support experts in creating 3D printable mechanisms that can be customized by unskilled end users. Masha Sugrina, Wojciech Matusik |

|
Foldable Quad Rotor We are investigating ways to make strong and customizable folded mechanical structures using a laser cutter in order to support robot development for the expeditions project. After starting with single-sheet lasercut plastic sheet to make the quad-rotor frames, we are now investigating the use of interlocking panels of rigid plastic wrapped up in a thin layer of high tensile strength bendable plastic. This approach has the opportunity to offer the same ease - of manufacture as the folded single sheet designs, but with additional features, increased stiffness and quicker assembly time. We hope to expand the scope of this process to allow work on additional projects in the near future. Ankur Mehta, Cagdas Onal, John Romanishin, Daniela Rus |

|
Geometric Design of Print-and-Fold Robots via Composition Print-and-fold manufacturing has the potential to democratize access to robots with robots that are easier to fabricate using materials that are easier to procure. Unfortunately, most current work in origami-inspired engineering focuses on folding static structures and does not translate well to design of robots, which must be able to move to manipulate the environment. Those transformable devices that do exist have so far all been designed manually. Our goal is automated design of fold patterns to achieve arbitrary kinematics, and our approach is composition. We have developed parameterized fold patterns for common joints that are found in robots and a provably-correct algorithm for composing these joints with each other and with the unfoldings of rigid bodies to produce foldable mechanisms. We have folded many of the resulting mechanisms. We have also added actuation and control circuitry to our fold patterns, showing that it possible to create a print-and fold robot with many different kinematics using a uniform process. Cynthia Sung, Daniela Rus, Martin Demaine, Erik Demaine |
|
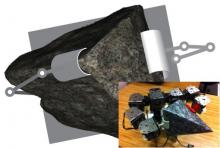
Grasping and Fixturing with Customized Effectors We have been interested in using curved, i.e., planar, cylindrical, or spherical, effectors for robotic grasping tasks. We have realized that every polyhedral object can be immobilized and caged with at most three such effectors. As one application of the theory, we are implementing "whole-arm grasping": in the figure, the virtual rock (as well as the "real" rock in the small figure at the lower right corner) cannot move, i.e., the two cylindrical effectors of the manipulator are immobilizing it; then, other contacts from the two arms or the torso can be added without losing stability. The two-armed robot is thus performing whole-arm grasping, which can be useful for a wide range of large, bulky objects, without special-purpose end-effectors. Vijay Kumar, Jun Seo, Mark Yim |

|
M-Blocks: Self-Reconfigurable Modular Robots This project aims to design a novel self-assembling, self-reconfiguring cubic robot that uses pivoting motions to change its intended geometry. Each individual module can pivot to move linearly on a substrate of stationary modules. The modules can use the same operation to perform convex and concave transitions to change planes. Each module can also move independently to traverse planar unstructured environments. Daniela Rus, Kyle Gilpin, John Romanishin |
|
popupCAD: Design and Manufacturing Automation for Programmable Printable Machines To facilitate faster prototyping and development of printable, popup, and self-folding devices, we have developed a design tool called popupCAD. By building this design tool around the specifics of the layered manufacturing PC-MEMS paradigm, we hope to speed workflow by encouraging design methods which are inherently manufacturable. The object-oriented structure of designs produced with popupCAD has the potential to reduce design flaws by encouraging modularity, reusing successful components rather than requiring designers to redraw them. Dan Aukes, Rob Wood |
|
Pouch Motors: Printable/Inflatable Soft Actuator> We propose a new family of fluidic soft actuators called Pouch Motors. The pouch motor actuators are designed to create printable actuators for enhancing mass-fabrication of robots from sheet materials using easily accessible tools. The pouch motor consists of one or more gas-tight bladders fabricated by heat bonding. We developed a method for creating two types of actuators from inflatable pouches: the linear pouch motor and the rotational pouch motor. Ryuma Niiyama, Xu Sun, Sangbae Kim |

|
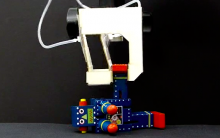
Printable Micro-manipulation System and Human-interface Devices This project proposes a new micro-manipulation system that features a desktop-based programmable design and an origami-based planar fabrication method. The developed micro-manipulation system consists of two printable machineries. One is a printable finger exoskeleton acting as a master, and the other is a printable micro-manipulator acting as a slave. The motion of the finger exoskeleton which is moved with a human finger is reduced in the manipulator domain via a simple hydraulic power transmission system. Operators can pick and place micro objects in 3-D space using the developed printable micro-manipulation system. This research shows that printable robots can be used for micro-robotic and medical applications, and a new physical human robot interaction (pHRI) device. Sangbae Kim, Sehyuk Yim |

|
REACT: Event-driven Asynchronous Concurrent Turing-complete Software development for Robotics is challenging. Programming language support is balkanized (non-standard and lacking support), resulting in environments with a steep learning curve, particularly for hobbyists. The innate complexity of concurrent programs in addition to the abstraction gab between the problem domain level and the implementation level further exacerbate the problem. REACT (recursive acronym for REACT: Event-driven Asynchronous Concurrent Turing-complete) is a programming language designed to make robot programming intuitive and easy to learn, applicable to a wide range of applications, while providing powerful expressiveness. REACT proposes a new model-based programming paradigm that enables programmers to write concurrent and abstract domain programs as if they were simple sequential programs, with atomic actions updating a single, shared global state. Additionally, REACT allows programmers to declaratively define security invariants and policies. The REACT runtime environment executes the program and is in charge of ensuring the high-level semantics of models, automatically handling (and hiding from the programmer) complications such as network communication, serialization, synchronization, security, concurrency and races. Martin Rinard |

|
Robot Self-Assembly by Folding Printing and folding are fast and inexpensive methods for prototyping complex machines. Self-assembly of the folding step would expand the possibilities of this method to include applications where external manipulation is costly, such as micro-assembly, mass production, and space applications. This project investigates a method for self-folding of printed robots from two-dimensional materials based on shape memory polymers actuated by joule heating using embedded circuits. This method was shown to be capable of sequential folding, angle-controlled folds, slot-and-tab assembly, and mountain and valley folds. These features, in turn, can be combined to create complex structures and dynamic linkages, and all necessary components for the folding process can be embedded in the machine, enabling autonomous assembly. We can also include additional functional layers such as magnetic sheets and copper pads to create planar sensors that are compatible with the self-folding fabrication process. Cagdas Onal, Daniela Rus, Michael Tolley, Erik Demaine, Rob Wood, Sam Felton |

|
Scripted printable robots Robotic systems hold great promise to assist with household, educational, and research tasks, but the difficulties of designing and building such robots often are an inhibitive barrier preventing their development. The goal of this project is to create a framework in which simple robots can be easily designed and then rapidly fabricated and tested. The Python package being developed in this work allows for the scripted generation of mechanical elements, using the principles of hierarchical structure and modular reuse to simplify the design process. These structures are then manufactured using an origami-inspired method in which laser cut sheets of plastic film are folded to achieve desired geometries. As an initial design goal, a lightweight, low cost, rapidly built quadrotor was designed and fabricated using these processes. Flight tests compared the resulting robot against similar micro air vehicles (MAVs) generated using other processes. At the expense of flight efficiency due to the lower tolerance and precision from the fabrication process, this robot took significantly less time to build, and yielded a lighter, lower power MAV. Ankur Mehta, Daniela Rus, John Romanishin, Mark Yim, Matt Piccoli, Vijay Kumar, Yash Mulgaonkar |

|
Self-Folding by Uniform Heating We demonstrate a new approach to autonomous folding for the body of a 3D robot from a 2D sheet using heat. We approach this challenge by folding a 0.27mm sheet-like material into a structure. We utilize the thermal deformation of a contractive sheet sandwiched by rigid structural layers. During this “baking” process, the heat applied on the entire sheet induces contraction of the contracting layer and, thus, forms an instructed bend in the sheet.
Cagdas Onal, Daniela Rus, Shuhei Miyashita |

|
Template-Based Design and Fabrication of Printable Hexapod Robots Robotic systems traditionally require highly specialized fabrication and assembly processes. Printable Robots systematizes the development of 3-D robots using inexpensive, fast, and convenient 2-D fabrication processes and origami-inspired folding. Using a library of design templates consisting of physical modules and their corresponding theoretical models, the goal is to tailor these designs based on a specific set of task criteria by tuning the free parameters. The resulting customized design provides the blueprints for fabrication: a circuit design for the planar fabrication of the electronics, and a folding pattern to create the 3-D machine. In this project we demonstrated this template-based approach in the fabrication of a printed ambulating hexapod. Beginning with the same basic template, we varied template parameters to fabricate three printed robots tailored to different applications, and tested them experimentally. Cagdas Onal, Daniela Rus, Michael Tolley, Rob Wood |

|
The Pico-Quadrotor: An Autonomous 25g Micro Aerial Vehicle The past decade has seen an increased interest in Autonomous Micro Aerial Vehicles (MAVs). Rotary wing MAVs such as quadrotors, can operate in confined spaces, hover at a given point in space and perch or land on a flat surface. This makes the quadrotor a very attractive aerial platform with tremendous potential. The main goal and key contribution of this paper is to design and prototype an MAV that weighs less than 30g and is capable of autonomous flight. We have also shown how to scale the quadrotor design down to a little over 4 inches in diameter. An added benefit of scaling down, is that it not only increases the agility of the robots but also increases the ability of the robots to operate in tight formations for flying in confined spaces. We envision the final goal of this project as a large swarm of pico-quadrotors to be deployed outdoors for surveillance / mapping applications. We illustrate the agility of our newest design in indoor autonomous aerial navigation experiments at top speeds of 6m/s. Vijay Kumar, Yash Mulgaonkar |